Fórmulas de transformación bidimensional
Las transformaciones bidimensionales son operaciones que cambian la posición, tamaño o forma de un objeto en el plano. Se utilizan en una variedad de aplicaciones, como gráficos por computadora, procesamiento de imágenes y robótica.

Las fórmulas de transformación bidimensional se pueden clasificar en dos categorías principales: transformaciones rígidas y transformaciones no rígidas.
Transformaciones rígidas
Las transformaciones rígidas no cambian la forma del objeto. Las transformaciones rígidas básicas son:
- Traslación: Mueve el objeto una distancia determinada en una dirección específica.
P'(x', y') = (x + tx, y + ty)
donde:
P' es el punto transformado
P es el punto original
tx y ty son las distancias de traslación
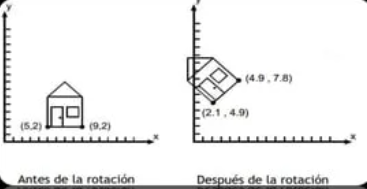
Rotación: Gira el objeto alrededor de un punto específico.
P'(x', y') = (x * cos θ - y * sin θ, x * sin θ + y * cos θ)
donde:
P' es el punto transformado
P es el punto original
θ es el ángulo de rotación
Escalamiento: Cambia el tamaño del objeto.
P'(x', y') = (x * sx, y * sy)
donde:
- P' es el punto transformado
- P es el punto original
- sx y sy son los factores de escala
Transformaciones no rígidas
Las transformaciones no rígidas cambian la forma del objeto. Las transformaciones no rígidas básicas son:
- Afinación: Cambia el tamaño, la posición y la orientación del objeto.
P'(x', y') = (ax + b, ay + c)
donde:
P' es el punto transformado
P es el punto original
a, b y c son los parámetros de afinación
Deformación: Cambia la forma del objeto de una manera no lineal.
P'(x', y') = f(x, y)
donde:
- P' es el punto transformado
- P es el punto original
- f(x, y) es una función que define la deformación
Sintaxis
Las fórmulas de transformación bidimensional se pueden escribir en forma vectorial o matricial.
En forma vectorial, las transformaciones se representan como un vector de transformación que se multiplica por el vector de coordenadas del punto original.
P' = T * P
donde:
- P' es el punto transformado
- T es el vector de transformación
- P es el punto original
En forma matricial, las transformaciones se representan como una matriz de transformación que se multiplica por el vector de coordenadas del punto original.
P' = M * P
donde:
- P' es el punto transformado
- M es la matriz de transformación
- P es el punto original
Las operaciones básicas de transformación son:
Escalamiento

Rotación
Traslación
Se aplica una traslación en un objeto para cambiar su posición a lo largo de la trayectoria de una línea recta de una dirección de coordenadas a otra. Convertimos un punto bidimensional al agregar las distancias de traslación, tx y ty la posición de coordenadas original (x,y)